
研究紹介
ハプティクス研究センターではリアルハプティクス®に関連する幅広い研究と開発を行っております。
慶應義塾大学発のベンチャーであるモーションリブ株式会社(代表取締役 溝口貴弘博士)が製造販売しているABC-CORE®を用いることで、容易にリアルハプティクス®及び関連技術を開発することが可能になりました。
ハプティクス研究センターでは基本から応用まで多種多様な研究開発課題に取り組んでいますが、多くの課題は企業や研究組織との共同研究課題になっています。
リアルハプティクス®それ自体はシーズ技術であり、マイクロ環境から大規模なマクロ環境まで様々な応用分野に展開できます。
そのいくつかをご紹介しましょう。
力触覚伝送技術
a.通信路を経由しない力触覚伝送研究例
- 1.医用デバイス
体外や体内において通信路を経由せずに遠隔でデバイスを作用させることで治療や診断を行うシステムの研究開発を企業と共同で行っています。医学部、理工学部、看護学部等が参加している研究もありますが、一部は学外の(地独)神奈川産業技術総合研究所や横浜国立大学あるいは地域クリニック等とも共同で実施しています。共同研究企業から治療デバイスや診断デバイスとして上市することを目標にしております。デバイスの中には遠隔デバイスと手元デバイスを一体化したユニークな治療機器も開発しておりリモート・ローカル両方を一つのコントローラで制御するメリットを活かしています。 - 2.福祉・介護・看護機器
人に直接触りながら優しく丁寧に介助する機器は作業者の負担を軽減し、しかも被介助者も無理な姿勢を回避できるという特長があります。対象が人間であり時々刻々その位置や姿勢が変化するので瞬時に力触覚を伝送するリアルハプティクス®が必須になります。 - 3.力制御・力計測
力制御はデバイスが環境に適応して動作するときに必要な柔らかい動作を実現してくれます。機構的に柔らかくするのではなくリアルハプティクス®の基本機能を使って制御により柔らかい動きを実現するので、環境に応じて瞬時に柔らかさを変化させることができます。その結果、嵌めあい動作、勘合動作、挿入動作、トルク・力管理動作、把持動作、把握動作、押し動作、押付け動作、引きつけ動作や締め付け動作などの本質的に柔らかさが求められる動作の自動化や遠隔による操作が実現可能になります。また、リアルハプティクス®は力センサがなくとも力を正確に推定する能力を持つので力・トルク計測あるいは重量計測を力センサなしに実行できます。これらの技術は生産技術や製造技術に多くの応用分野があり、企業との様々な共同研究が進んでいます。
b.通信路を経由する力触覚伝送研究例
- 1.遠隔操作
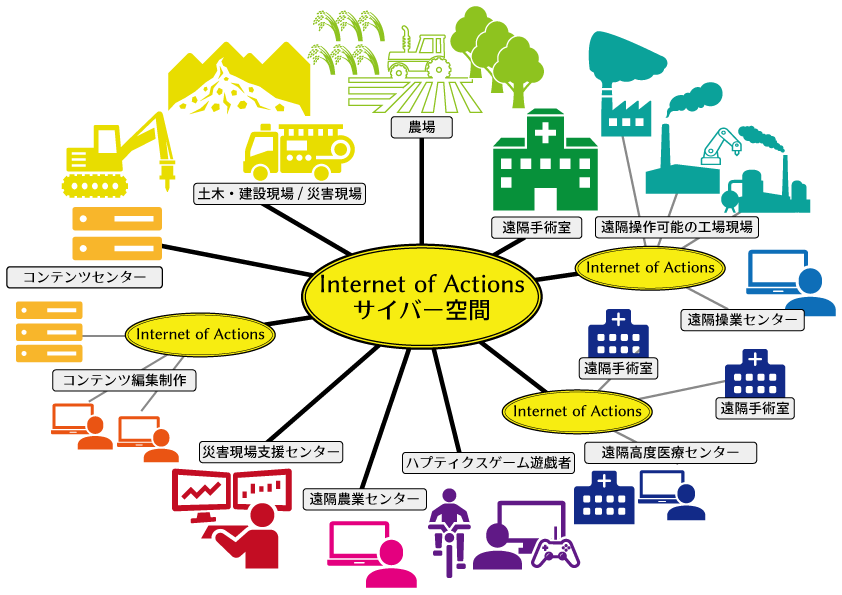
作業環境によっては人が直接作業することが困難な場合や、騒音等で長時間の作業に不向きな場合、あるいは作業範囲が非常に狭い場合や逆に広い場合等では遠隔で作業を実行する必要があります。視覚等の他に力触覚を作業者に伝送することで精密な作業が可能になるので、通信路を確保して感覚伝送を行う研究を行っています。通信路には有線や無線が考えられ、信号遅延や情報欠落等があっても安全で性能劣化の少ないシステムデザインを企業と研究しています。作業対象がバーチャルであっても遠方からあたかも実在の対象に作業を行っているかのような仮想空間と実空間との間の力触覚伝送も可能で、様々な研究機関との共同研究が進行しています。 - 2.インターネット・オブ・アクションズ(IoA®)
リアルハプティクス®により得られる作業動作情報をクラウド上に準備しておき、ブラウズして通信路越しに利用する仕組みを企業と共同で研究しています。この仕組みを立ち上げることで、いつでも、誰でも、どこでも様々な動作情報を利用できるようになります。この仕組みを使うと、ネットワーク接続されたロボットが人のように融通の利く柔らかい動作を発現して私たちの身の回りで様々なサービスを安全にしかも適確に提供してくれるようになります。
力触覚再現技術
力触覚再現技術は人間の動作の再現技術です。
録音や録画と同様に力触覚も記録して再現することができます。力触覚は動作があって初めて出現する感覚になります。
従ってその再現は実は動作の再現と同義になります。つまり、力触覚を機械で再現する事とは元の人の動作をまねする事と同じ意味なのです。
もちろん、リアルハプティクス®により人の作業に含まれる力加減も含めて記録して再現しますので、単なる位置トラッキングではなく動作の柔らかさを含めてそっくりに再現することになります。
元の動作には作業者しかできない熟練作業である場合には、その動作をそっくり機械で再現できるということになります。
つまり、作業における匠の技をデータとして記録して再現できることを意味しています。
リアルハプティクス®から得られる力触覚情報によりその伝送のみならず記録再現に大きな応用分野が開かれようとしています。
a.動作スキルの抽出、実装例
- 1.作業の記録再現
手元側を人間が操作して遠隔デバイスにより作業をすることで作業者の動作情報(力、速度、運動学情報、時間)を記録して遠隔デバイスだけで動作をさせることで元の作業の持つ動作の暗黙知を含めて再現するシステムを企業等と共同で構築しています。一部はすでに実用化していますが、高度化を目指して人工知能技術を取り入れながら更に高度なシステムを目指しています。 - 2.高度な動作の設計ツール
人間の動作を解析することで人間を超えた動作を発現する仕組みを構築しています。これは想定外の状況変化や機械自体の進化を可能にすると期待されています。JSTのご支援等を得ながらシステムを構築しようとしています。
研究事例
 慶應義塾大学ハプティクス研究センター遠隔操作ロボットアーム
慶應義塾大学ハプティクス研究センター遠隔操作ロボットアーム 慶應義塾大学ハプティクス研究センター油圧ロボットの紹介
慶應義塾大学ハプティクス研究センター油圧ロボットの紹介 慶應義塾大学ハプティクス研究センターPCR 検体採取システム
慶應義塾大学ハプティクス研究センターPCR 検体採取システム 慶應義塾大学ハプティクス研究センターサイバーバイク
慶應義塾大学ハプティクス研究センターサイバーバイク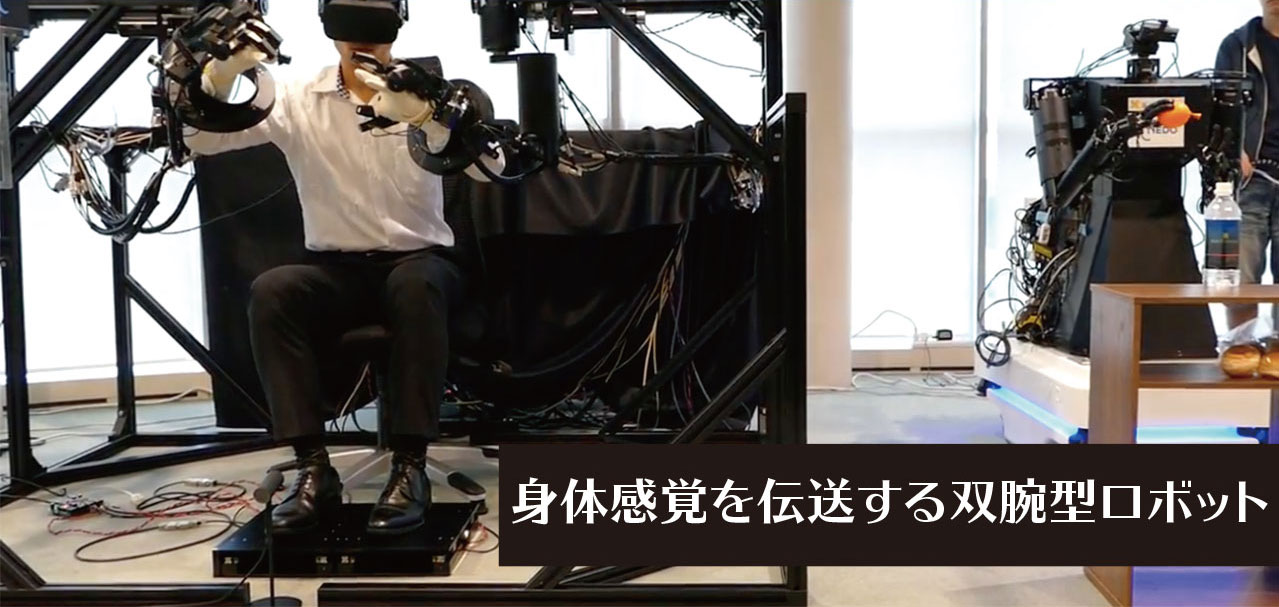 慶應義塾大学ハプティクス研究センター身体感覚を伝送する双腕型ロボット
慶應義塾大学ハプティクス研究センター身体感覚を伝送する双腕型ロボット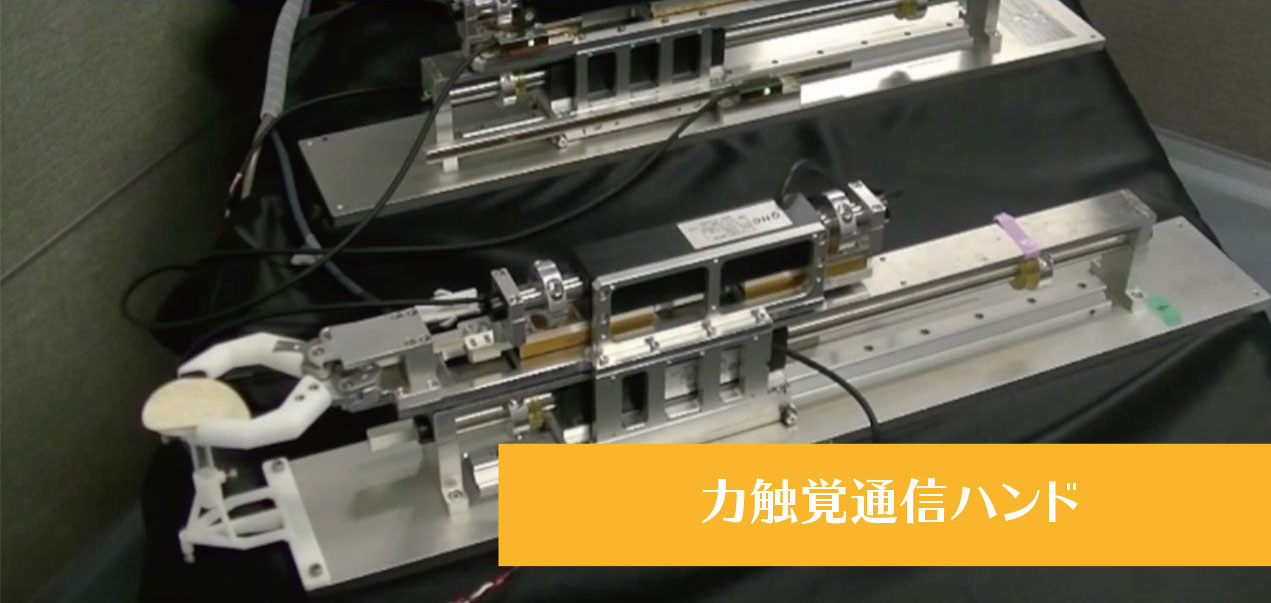 慶應義塾大学ハプティクス研究センター力触覚通信ハンド
慶應義塾大学ハプティクス研究センター力触覚通信ハンド 慶應義塾大学ハプティクス研究センターバイラテラルロボット
慶應義塾大学ハプティクス研究センターバイラテラルロボット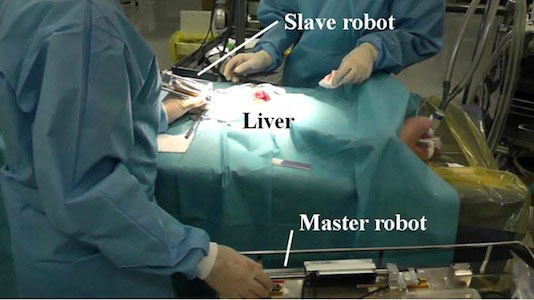 慶應義塾大学ハプティクス研究センター医療ロボット
慶應義塾大学ハプティクス研究センター医療ロボット 慶應義塾大学ハプティクス研究センター多自由度ロボット
慶應義塾大学ハプティクス研究センター多自由度ロボット
