横浜ロボットワールド2024
ロボットが臨機応変に動作する!
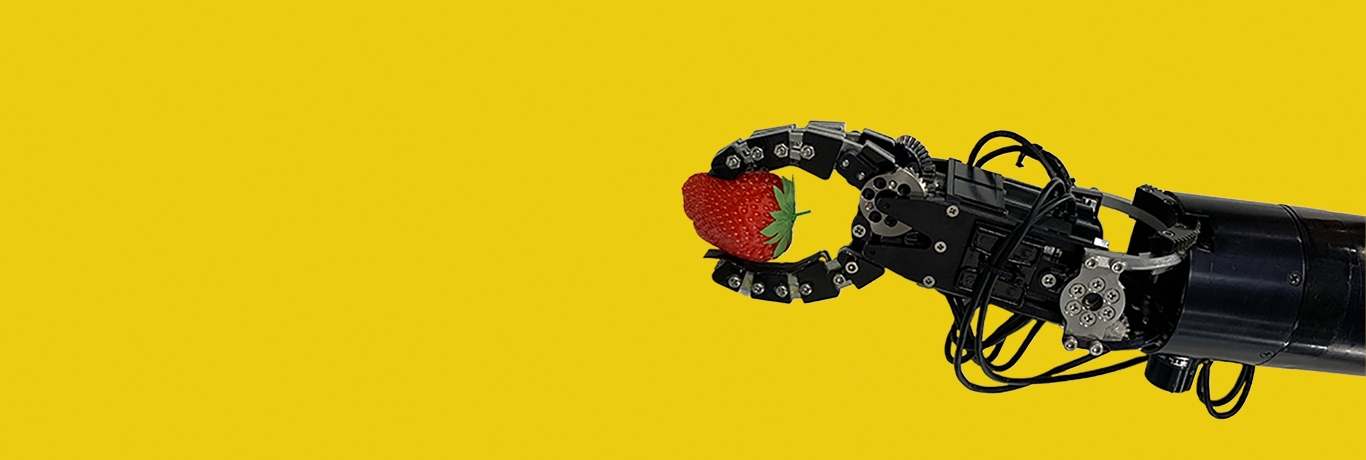
ロボットはコンタクトタスク(接触作業)が苦手だ。それは対象がどのような性質を持っているかわからないからだ。人ならば「対象が硬いときはこうする」あるいは「対象が柔らかければああする」といった臨機応変な動作ができるが、ロボットは不器用で相手かまわず自分の動きだけを実現しようとする。なぜなら、対象の性質を知るための力触覚感覚がないためだ。挙句の果ては対象を破壊したり落としたりする。これに対して人は力触覚により対象の性質を瞬時に把握して相手に合わせる。ビー玉でも卵でもテニスボールでも、上手に掴んで壊したり落としたりすることは無い。
人はどのように力触覚を感じて、動作に反映させるのだろうか。その仕組みをどのようにロボットに実装したらよいのだろうか。
慶應義塾大学では人の力触覚の刺激量(力触覚量)を世界で初めて高速で計算することに成功した。力触覚量はその大きさを表す「強度」と触ったときの感触を表す「質感」で定義でき、いずれも具体的な数字データとして毎秒1000回も計算できる。この新技術により、ロボットも触った瞬間に数字で表される力触覚を持つことができる。力触覚データが得られれば、過去に記録された動作から対象にふさわしい動作を瞬間的に生成することができるので、人のように臨機応変な動作が可能になるのだ。その実験例を会場の研磨ロボットで実際に確かめることができる。臨機応変なロボットの動作を見たいと思わないか?
News
- 横浜ロボットワールド2024に出展いたします。New!
日時:12月5日(木)・6日(金)
会場:パシフィコ横浜(ホール C ブース番号 4-24) - セミナー講演のお知らせ New!
日時:12月6日(金) 13:30-14:30
会場:セミナー会場A
講師:ハプティクス研究センター センター長 大西 公平
タイトル:ロボットが臨機応変に動作する! - 【動画】リアルハプティクス®技術のご紹介New!
- 臨機応変ロボットプロジェクト公募New!
- 【プレスリリース】「自動火薬装填システム」でトンネル切羽発破に成功New!
見どころ
【ロボットが臨機応変に動作する!】をテーマに「自動研磨ロボット」と「包装製品の非破壊状態判定システム」を出展いたします。 リアルハプティクス技術のデモ体感にブースまでお越しください。

自動研磨ロボット
力リアルハプティクス技術を用いた双方向での力触覚通信技術を用いて、研磨のノウハウをリーダフォロワー(親機子機)ロボットで収集し、その情報を用いて自立的に賢い研磨作業を行います。自動研磨ロボットは様々な研磨対象を自動で判別し、それに合わせた研磨動作を自立的に行うことが可能です。
公開動画
共同研究事例
産官学連携のページにて紹介しております。