ハプティクス研究センター特設ページ
ロボットが身近にいる未来を目指して
人は対象物に接触した瞬間、加減する本能的な能力を持っていますが、ロボットはこのような反射的力制御能力がなく、硬くてぎこちない動きしかできず、人との協働や柔軟物、漸弱物に対する接触作業を苦手としてきました。 ハプティクス研究センターでは、力触覚を伝送するリアルハプティクス技術とAIを融合させることで人の持つ高度な運動能力がロボットでも実現できることを明らかにしました。この技術を次世代ロボットに実装すれば、私達の身近で支えてくれる新しい時代が来ることでしょう。
News
- 「ぐんま Digital Land」に出展いたしますNew!
- 開催日時:令和5年3月21日(火曜・祝日)、22日(水曜) 午前10時~午後4時30分
リアル会場:Gメッセ群馬 展示ホール(高崎市岩押町12-24)
主催:群馬県/ぐんま未来イノベーションLAB(「ぐんま Digital Land」開催実行委員会)
出展ブース:ブースNo.15
- 開催日時:令和5年3月21日(火曜・祝日)、22日(水曜) 午前10時~午後4時30分
- 【プレスリリース】力触覚の伝達が可能なリアルハプティクス技術搭載骨ドリルを新開発 -安全な脊椎手術の実現に向けた大きな進歩-
- 【プレスリリース】5Gの高信頼低遅延通信URLLCを活用し、ヒトの手を動かして感じ取れる手応えをロボット上で再現することに成功-日本初、慶大の独自技術「リアルハプティクス」をモバイルデータ通信で実現-
ロボットが身近にいる未来を目指して
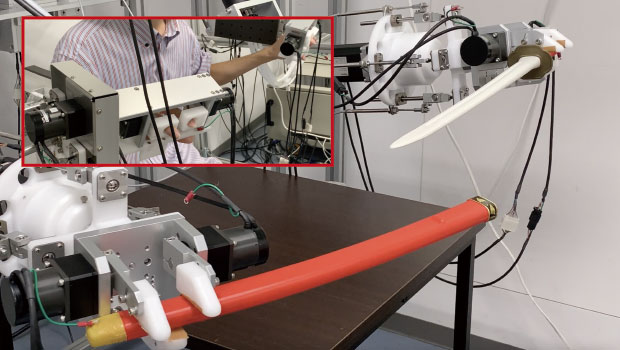
腱駆動機構による独⾃の構造を持つ遠隔操作型ロボットアーム
〈概要〉独⾃のワイヤを⽤いた腱駆動機構を有するロボットアーム。本ロボットアームは⼈間の腕を模した構造となっており、モータ本体を腕の構造体とすることで⼤幅な出⼒体積⽐の向上を図っている。またボールジョイントとシャフトを⽤いた特徴的な⼿⾸関節機構を実現しており、駆動源を⼿先ではなく外部に実装することで装置の安定化に貢献している。
〈期待される分野〉
アクションを蓄積し、AIを用いることによりロボットはより身近になります。
- 不定形物や柔らかいものを掴む・運ぶ・優しく扱う動作
- 熟練者の研磨・研削技術の承継
- 有名シェフ、思い出ある料理手法の再現
Think RobotⓇ/ 廃棄物発電設備 ガス化溶融炉 炉前作業ロボット
日鉄エンジニアリング株式会社/モーションリブ株式会社/慶應義塾大学
〈概要〉廃棄物発電設備ガス化溶融炉において、従来、人によって行われていた出湯口に凝固・付着した溶融物の清掃作業をロボットの遠隔操作で実現しました。この清掃作業には鋼製の突き棒を用いますが、強く突き過ぎると煉瓦を損傷させてしまうため、作業者は視覚だけでなく、付着物の硬さや粘り気など微妙な触覚を頼りにしながら動作を都度変える非定型な作業を行っています。本システムでは、ロボットを自由自在に操作する「リアルタイム制御技術」と、 ロボットが受けた反力をオペレータの操作レバーに伝送する「リアルハプティクス技術」を適用することで、微妙な触覚を感じながら遠隔での作業を実現しました。

〈効果〉
炉前の高温な環境下での人手作業をロボットに代替し、快適な操作室で人が遠隔操作を可能としたことで作業負担を軽減するとともに、2名で行っていた現場作業を、1名の遠隔操作で対応できるようになったことから作業効率改善の効果も得られました。
【受賞】一般財団法人エンジニアリング協会「エンジニアリング奨励特別賞」
石油天然ガスの探鉱・開発・生産へのデジタル技術適用に関する研究支援事業
※JOGMEC公募

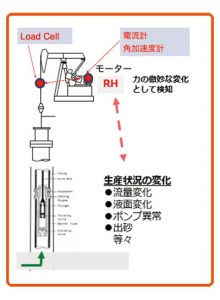
〈概要〉探鉱・掘削・開発から生産、輸送といった石油・天然ガスのオペレーション全般における効率化および高度化に向けたデジタル技術の適用を進めています。人が感じる力触覚の測定・伝送・再現が可能なリアルハプティクス技術の油井への適用として、サッカーロッドポンプ(SRP)を用いた操業中の油井の地下に設置された生産設備の稼働状況や健全性、生産量などのパラメーターの微細な変化をリアルタイムで検知することを目的に2020年度からJOGMECと共同で実証試験を実施しています。
〈Real Haptics®適用研究の目的〉
- 人工採油の一手法であるサッカーロッドポンプ(SRP)に対して、Real Haptics技術を適用し、代替ロードセルまたはそれ以上の性能や他分野での応用に期待。
- SRPの駆動モーターに設置した電流計および角加速度計により取得されたデータに対して、リアルハプティクス技術(力触覚の測定・再現)を適用することで、ロッド荷重の連続測定およびこれに基づくリアルタイムでの生産条件の把握・変更に資することを期待。
- 力触覚の測定=より微細な力の変化の把握であるため、生産量の変化やポンプ異常といった設備状況の変化に対する検知を期待。地下状況変化を地上で検知可能となるため、掘削への応用(岩相の変化、逸泥、抑留等の検知)も期待。

〈今後の可能性〉
本技術の適用により、様々な地下事象が反映されている地上のモータ挙動の変化を鋭敏に捉えることが可能となり、ひいては新たな計測器となり得ることを期待しています。将来的には、本技術を掘削にも適用することで地層の変化や逸泥・抑留といったトラブルの早期検知にも寄与し得る可能性があると考えています。 本共同研究を通して、操業の効率化・高度化、安全性の更なる向上を図り、エネルギーの安定供給を目指しています。

油圧駆動建設重機へのリアルハプティクス技術応用
リアルハプティクス技術を建設工事などの油圧駆動機械に用いることで、操作者が触覚・反力を感じることにより、繊細かつ安全に作業を進めることが可能になります。駆動側と操作側の「力の倍率」「距離の倍率」は任意に設定可能であり、操作側の小さな力でも駆動側は何倍もの力で大きく稼働することができます。
ゴロニャン
ゴロニャンは、遠隔から非接触で人と人とのスキンシップによるコミュニケーションを可能とするPetAvatarで、遠く離れた人と人との絆を維持し、一体感を共有し心の安定に寄与します。猫型ぬいぐるみにリアルハプティクス技術による力触覚伝送を実装したロボットを組み込んだPetAvatarです。
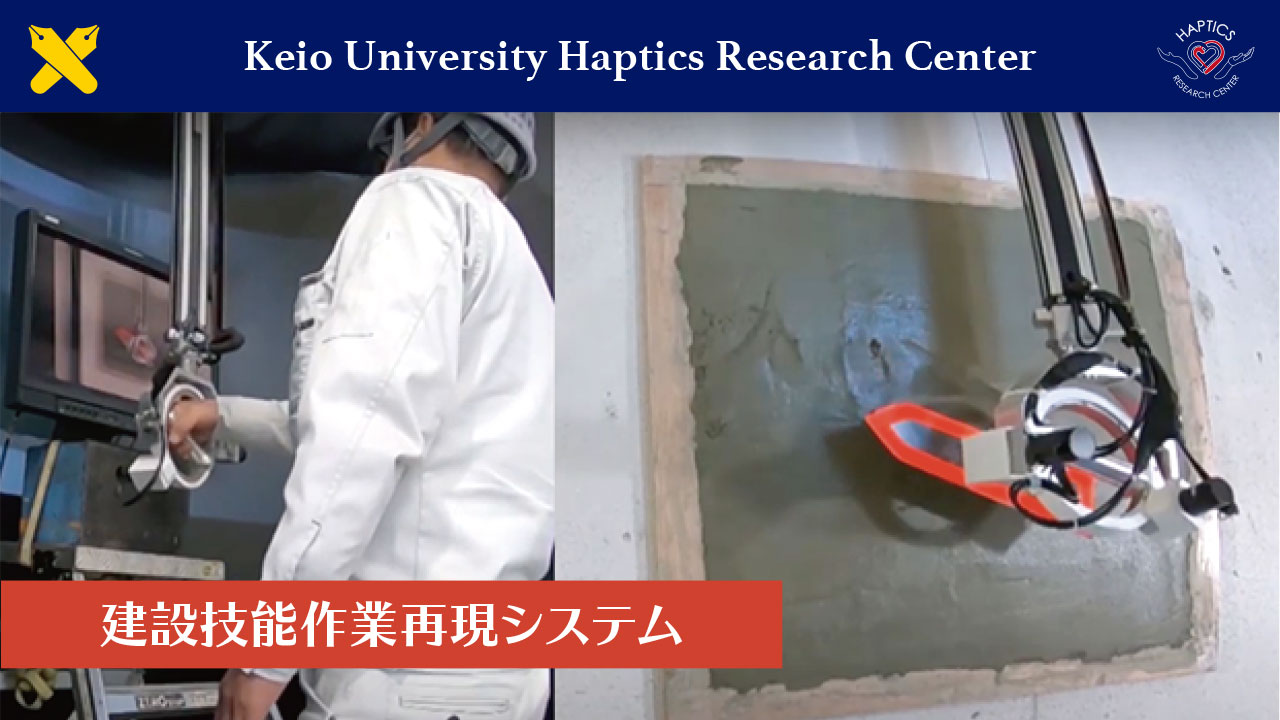
建設技能作業再現システム
力触覚を再現する技術「リアルハプティクス」を適用することで、左官作業における手の動きや力、力触覚を再現可能な建設技能作業再現システムを開発しました。このシステムは、人が操作するコテを模したハンドル装置(マスター)と、現地で動作するコテを設置したAvatarロボット(スレーブ)で構成されています。

袋状食品包装空気漏れ検査システム
リアルハプティクスとMR(複合現実)技術を組み合わせた袋状食品包装の空気漏れ検査システムです。リアルハプティクスにより力触覚を数値化することで空気漏れを定量的に評価すると同時に、MR 技術を利用して作業者が装着するホロレンズに検査結果を表示することで、従来の作業工程を大きく変えることなく作業者の熟練度やモチベーションに影響されない的確な作業を実現しました。

サイバーバイク
リアルハプティクス技術の応用により、遠隔で行為・感触がスケール自在で伝わり、あたかも自分が遠く離れた場所にいるかのような感覚を得ることができます。本装置では、バイクから電車を走らせ、線路の傾斜や路面環境が伝わる凜場間ある走りでプチ旅行体験できます。
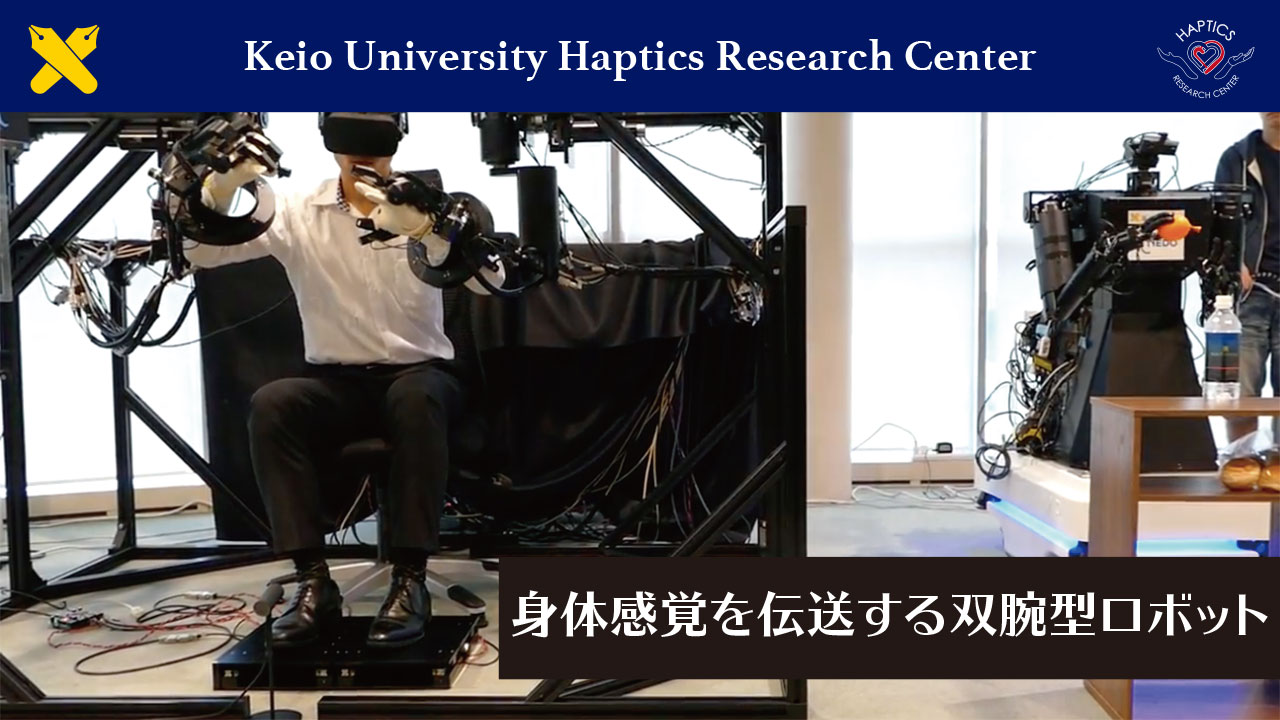
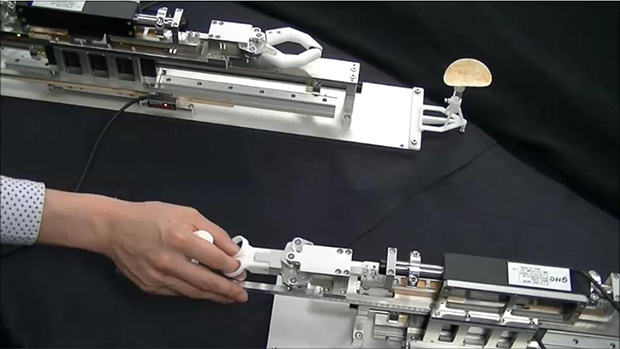
身体感覚を伝送する双腕型ロボット
少子高齢化を背景に、ロボットによる作業支援が期待されています。世界初の高精度力触覚技術を活用することで、人間同様に器用で巧みな動作を実現可能な双腕型ロボットを開発することに成功しました。
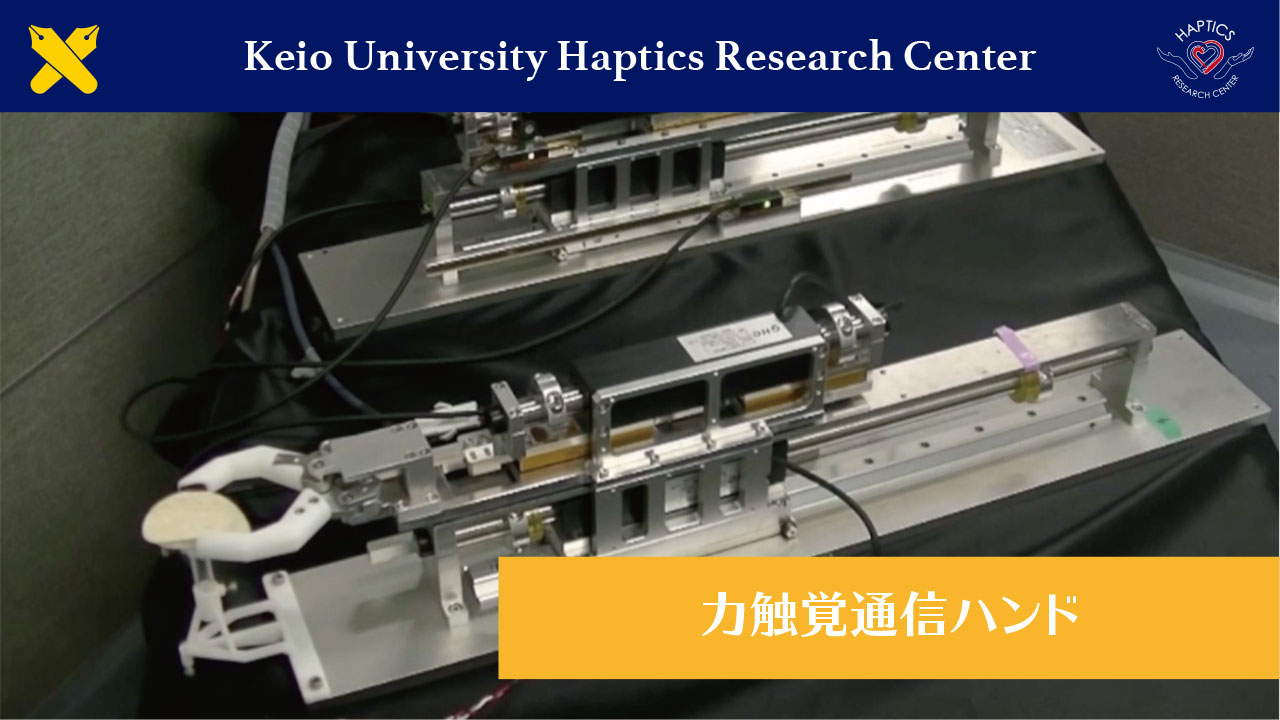
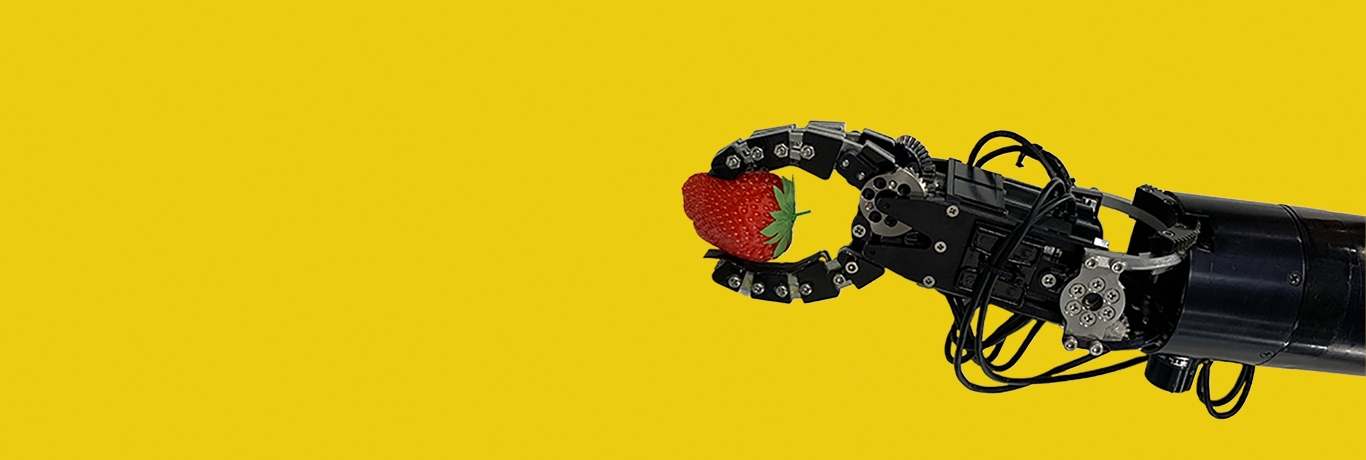
力触覚ハンド
マスタ・スレーブ型ロボットハンドを遠隔から操作してポテトチップスの把持感覚を手元に感じることで上手に掴むことができます。逆にリアルハプティクス技術が無く視覚情報のみの場合は力加減がわからず思わず割ることが多くなります。力触覚技術の応用で、人と柔軟に協調するロボットを実現しました